
آموزش آردوینو جلسه اول
بصورت پروژه محور با ربات NK-100
آردوینو چیست؟
آردوینو یک کامپایلر رایگان همراه با یک برد آماده با میکروکنترلر AVR است که اخیرا با میکروکنترلرهای دیگر نیز به بازار آمده و تمام قطعات لازم برای راه اندازی یک میکروکنترلر را دار می باشد. بخش هایی مثل تغذیه، اسیلاتور، پرورگرمر (بصورت بوت لودر) ، ورودی و خروجی، مدار ریست و غیره.
از آردوینو برای مقاصد آموزشی، نمونه سازی و تست و حتی در مواردی در دستگاه نهایی نیز استفاده میشود. آردوینو یک پلتفرم اپن سورس یا متنباز شامل یک کامپایلر رایگان به زبان ++C و یک سخت افزار با برنامه Boot Loader است که در مدلهای ساده عموما یک میکروکنترلر ATmega328 حاوی یک قطعه کد بوت در انتهای حافظه فلش میباشد. برنامه بوت لودر به گونهای نوشته شده که به کاربر اجازه می دهد از طریق پورت سریال میکرو آن را پروگرم کند و نیازی به پروگرمر جدا نداشته باشد.
بیشتر بردهای Arduino دارای یک مبدل USB به سریال روی برد میباشند که به ما این امکان را میدهد تا برد را با کمک یک کابل USB به کامپیوتر متصل کنیم و براحتی برنامه را روی برد پروگرم کنیم.
ربات NK-100 چیست؟
ما در این سری جلسات تصمیم داریم به امید خدا به صورت پروژه محور به آموزش کار با این برد بپردازیم. برای جذاب بودن این کار یک ربات به نام NK-100 ساختهایم که محصول تجاری نوینکیت بوده و مخصوصا با قطعات در دسترس و ساده ساخته شده است تا نوآموزان براحتی بتوانند این روبات را برای خود بسازند و آموزشها را روی آن انجام دهند.
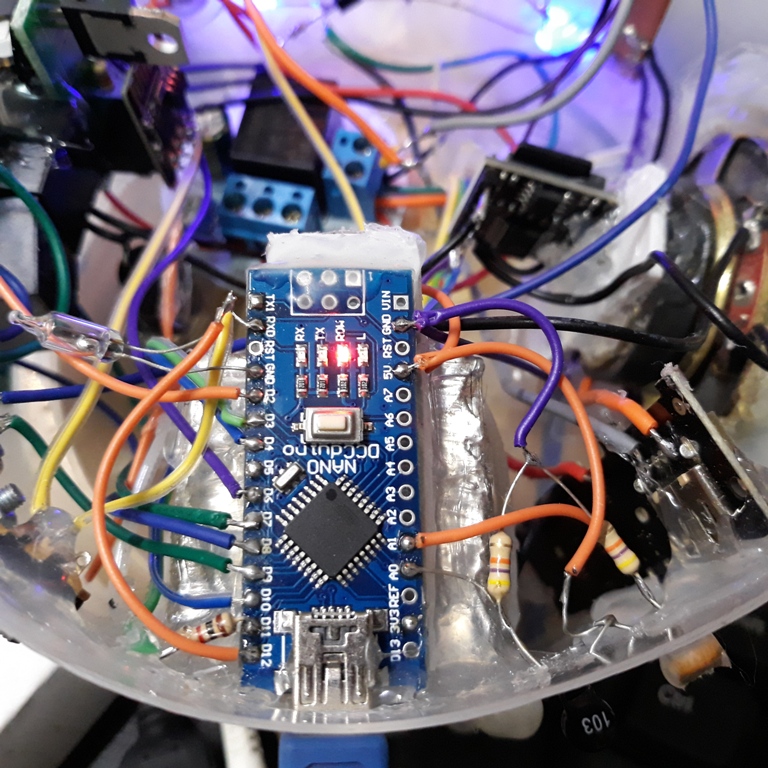
روبات NK-100 از برد Arduino Nano بعنوان هسته اصلی استفاده می کند و ماژولهای زیادی روی آن نصب شده است. تغذیه این برد از یک پک باتری لیتیوم یون 3.7 ولت و یک ماژول پاوربانک تامین میشود که براحتی میتوان توسط یک آداپتور، روبات را شارژ کرد و از خروجی ٥ ولت ماژول پاور بانک برای راهاندازی برد آردوینو نانو و سایر ماژولها استفاده نمود.

در قسمت دست روبات از یک گریپر با موتور سروو (Servo) به شماره SG90 استفاده شده که در آموزشهای بعدی با نحوه راهاندازی آن آشنا میشویم. این روبات سخنگو بوده و مجهز به ماژول پخش صدای DF Player میباشد، همچنین برای تشخیص فاصله از ماژول آلتراسونیک SR05 استفاده کرده و نیز از یک فتوسل برای بررسی شب و روز و یک NTC برای چک کردن دمای محیط بهره میبرد.
ربات NK-100 روی چهار چرخ جلو و عقب میرود و برای این کار از دو عدد رله استفاده میکند. چشمها و دهان روبات روشن و خاموش شده و برای کنترل از خارج از یک ماژول وایفای خارجی به نام ESP8266 استفاده میکند که با رگولاتور LF33 تغذیه شده و به پورت سریال میکرو متصل شده است. ماژولهای متصل به روبات ممکن است در طول آموزش بیشتر شود و بسته به شرایط از ماژولهای دیگری نیز استفاده شود. همانطوریکه میدانید هدف از این سری آموزشها یادگیری کار با ماژولها و قطعات مختلف بصورت کاربردی و پروژه محور میباشد تا بتوان کاربرد قطعات را در عمل مشاهده کرد و برای موارد دیگر براحتی استفاده نمود.
١- دانلود و نصب کامپایلر آردوینو
اولین قدم برای کار با برد آردوینو دانلود کامپایلر Arduino میباشد. برای دانلود این کامپایلر کافیست با جستجوی عبارت download Arduino در گوگل و یا ورود به سایت رسمی این کامپایلر به نشانی https://www.arduino.cc آن را دانلود و نصب نمود.
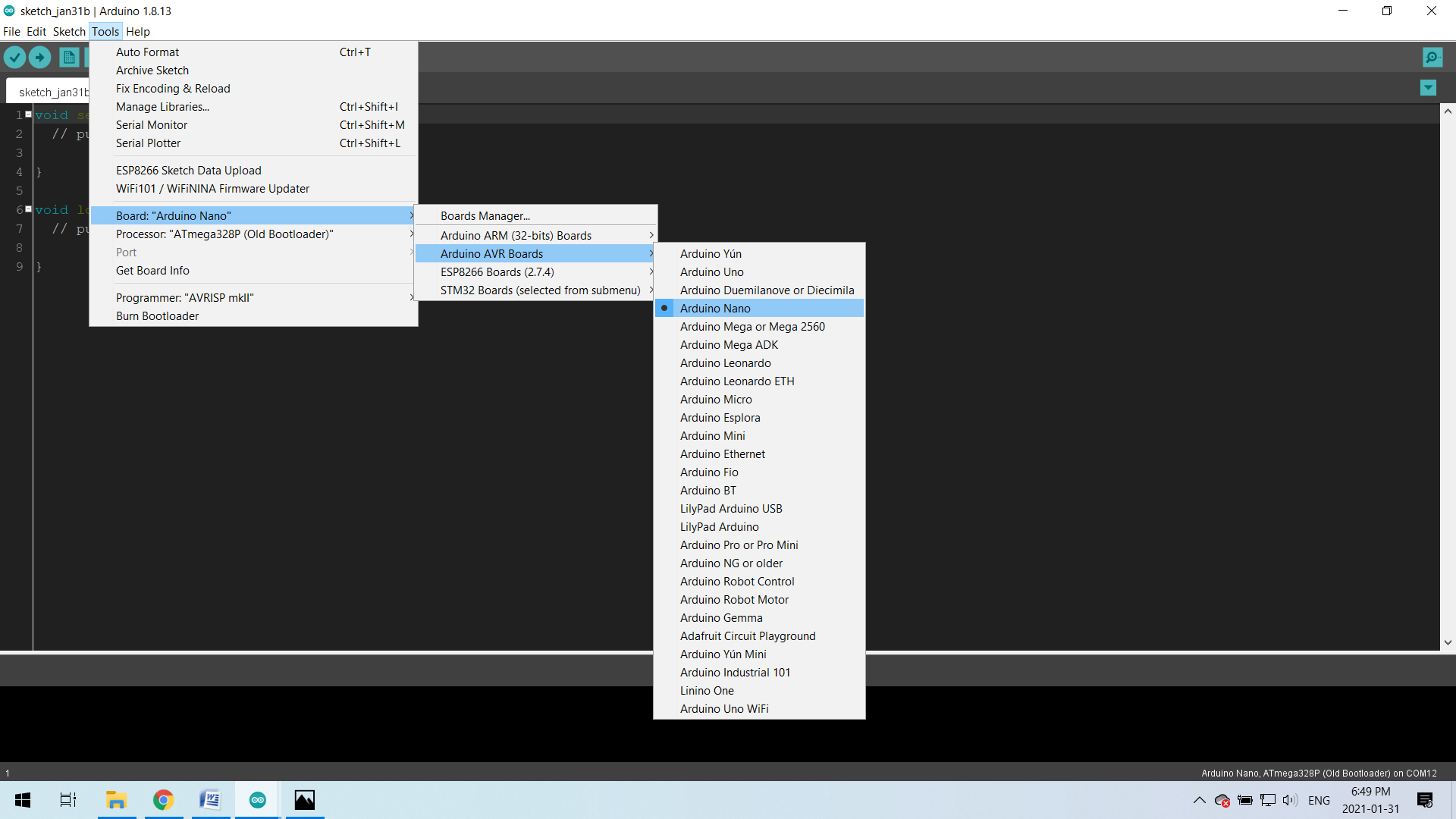
بعد از دانلود کامپایلر آردوینو آن را نصب کنید. نصب این کامپایلر بسیار ساده بوده و با چند کلیک نصب میشود. بعد از نصب و اجرا مطابق شکل زیر از منوی Tools روی Board کلیک کرده و از زیر منوی Arduino AVR Boards روی Arduino Nano کلیک نمایید. بعد از انتخاب برد اگر ماژول آردوینوی شما قدیمی است از منوی Tools و گزینه Processor روی ATmeg328P (Old Booloader) و در غیر این صورت روی ATmeg328P کلیک کنید.
البته در صورتی که از برد دیگری مثل Uno استفاده میکنید میتوانید برد مورد نظر خود را انتخاب نمایید. توجه داشته باشید گزینه های کامپایلر آردینوی نصب شده ممکن است اندکی با این تصویر تفاوت داشته باشد چرا که این کامپایلر مدام در روز بروز شدن است.
پس از انتخاب برد می توانید آردوینوی خود را به پورت USB کامپیوتر متصل کنید. بسته به سیستم عامل شما و بسته به چیپ مبدل USB به سریال روی برد آردوینو ممکن است نیاز به نصب درایور چیپ باشد و یا بصوت خودکار نصب شود. معمولا در سیستم عامل های مدرن مثل ویندوز ١٠ در صورتی که آنلاین باشید نصب درایورهای متداول به سرعت و بصورت خودکار انجام میشود. در صورت نصب شدن درایور میتوانید از منوی Tools روی Port کلیک کرده و شماره پورتی که برد به آن متصل شده را انتخاب نمایید.
٢- سخت افزار جلسه اول:
ما در جلسه اول قصد داریم به روش تعریف پایههای آردوینو بعنوان ورودی یا خروجی پرداخته و نحوه نوشتن در پورت یا خواندن از آن را آموزش دهیم.
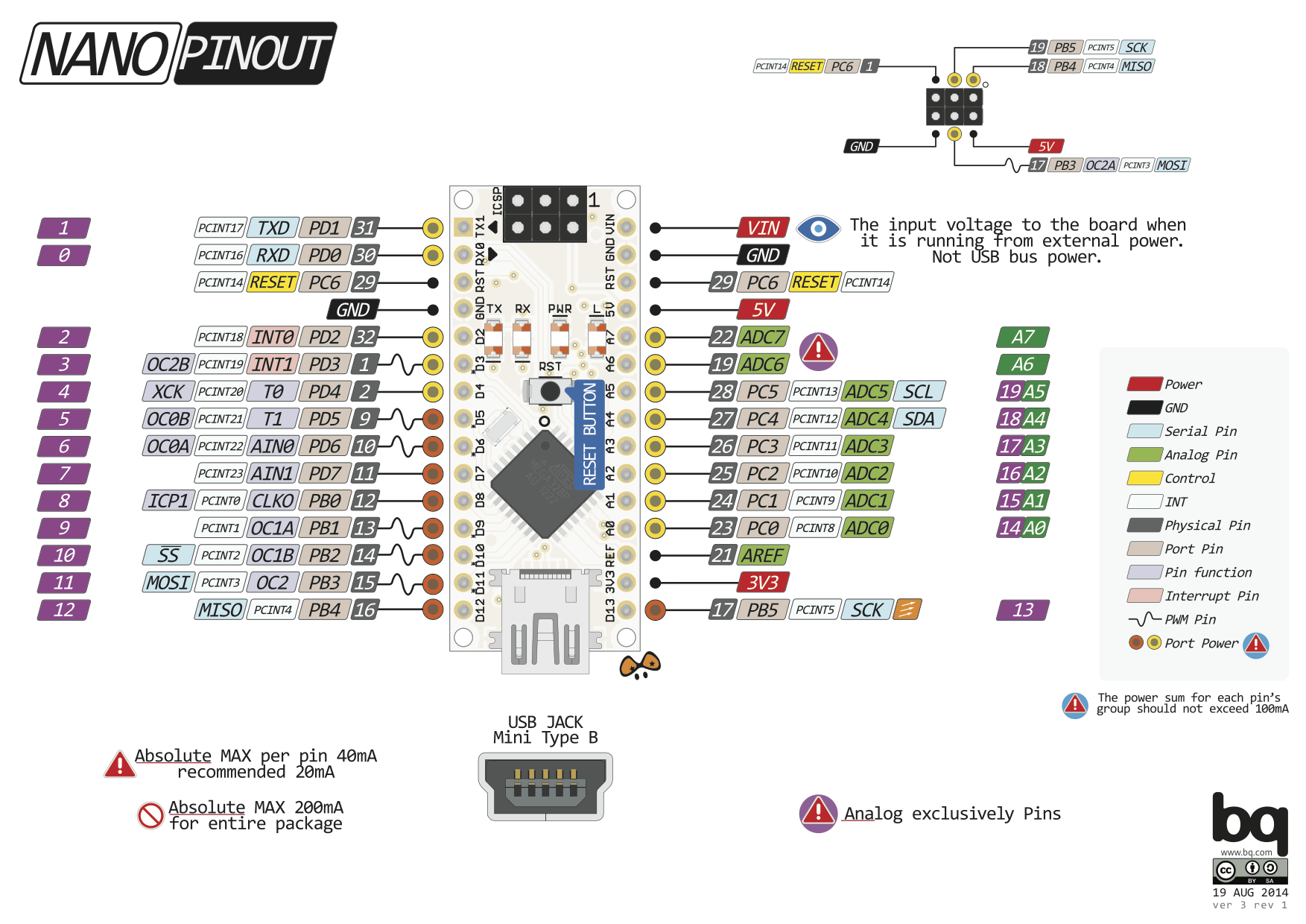
برد آردوینو نانو چیزی جز یک میکروکنترلر Atmega328 نیست که تمام پایههای آن از برد خارج شده و برای راحتی نوآموزان با اعداد نامگذاری میشود. مثلا D0 تا D13 برای پایههای ورودی و خروجی دیجیتال و A0 تا A7 برای ورودیهای آنالوگ. در شکل زیر میتوانید پورتهای متناظر با هر نام جدید را مشاهده نمایید.
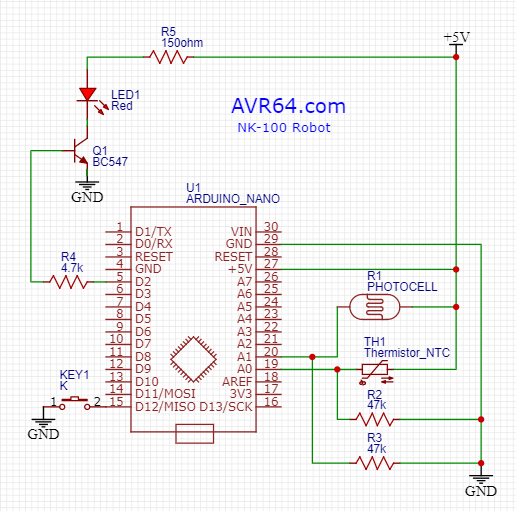
ما در جلسه اول چشمها و دهان ربات NK-100 را با کمک یک ترانزیستور منفی BC547 و یک مقاومت 4.7 کیلو اهم به پایه D2 متصل کردهایم و قصد داریم این پایه را بعنوان خروجی تعریف کنیم و آن را چشمکزن کنیم.
همچنین یک کلید جیوهای را به پایه D12 و منفی متصل کردهایم که با ورودی تعریف کردن این پایه و خواندن وضعیت کلید متوجه تکان خوردن روبات و ضربه شدید به سر روبات خواهیم شد. در جلسات آتی بعد از راهاندازی ماژول سخنگو به روبات میآموزیم که در صورت ضربه خوردن بتواند پاسخ مناسبی دهد.
همانطوریکه در بالا ذکر شد تعدادی از پایهها به عنوان A0 تا A7 نامگذاری شدهاند. این پایه ها معمولا برای ورودی آنالوگ استفاده میشوند و برای تست این پایهها نیز به پایه A0 یک مقاومت حرارتی NTC برای سنجش دما و به پایه A1 یک عدد فتوسل برای تشخیص نور محیط متصل کردهایم. روبات میتواند با سنجش دما فیدبکهای صوتی مناسبی بصورت تصادفی بیان کند و نیز در صورت روشن بودن چراغها و یا رها شدن در یک محیط تاریک عکس العمل تعریف شده را انجام دهد و حس هوشمند بودن را را به مخاطب القا کند. هر کدام از این پایههای ورودی آنالوگ با یک مقاومت ٤٧ کیلواهم به زمین متصل شدهاند تا تا میکرو بتواند تغییرات ولتاژ بین زمین و مثبت را که به وسیله فتوسل و NTC تغییر میکند بخواند.
٣- آشنایی با دستورات و توابع آردوینو:
قبل از شروع کد نویسی به یک سری مفاهیم نیاز داریم. آردوینو از یک میکروکنترلر استفاده میکند و پایههای آردوینو به پورتهای میکرو متصل شده است. هر پورت میکرو قبل از استفاده باید بصورت ورودی یا خروجی تعریف شود. در کامپایلر آردوینو برای این کار یک تابع به نام pinMode وجود دارد که دقیقا باید به همین شکل و با رعایت حروف کوچک و بزرگ نوشته شود. دقت داشته باشید که آردوینو از زبان ++C استفاده میکند و در این زبان حروف کوچک و بزرگ باهم تفاوت دارند.
تابع pinMode دو ورودی میگیرد. ورودی اول شماره پایه است که باید بصورت یک عدد صحیح وارد شود و آرگومان دوم حالت ورودی (INPUT) یا خروجی (OUTPUT). بعنوان مثال دستور زیر پایه متصل به LED های چشم و دهان ربات NK-100 را بعنوان خروجی تعریف میکند:
|
1 |
pinMode(2,OUTPUT); |
همچنین دستور زیر پایه متصل به کلید جیوهای را تبدیل به ورودی میکند:
|
1 |
pinMode(12,INPUT); |
توجه داشته باشید که بیشتر میکروکنترلرهای به کار رفته در بردهای آردوینو از جمله میکروکنترلرهای AVR روی پایههای خود مقاومت Pullup داخلی دارند که در حالت ورودی می توان آن را فعال کرد و با این کار ١ بودن پایه در حالت عادی تضمین میشود و از دریافت نویزهای محیط جلوگیری به عمل میآید. برای فعال کردن این مقاومت باید با دستور زیر پایه شماره ١٢ را ورودی تعریف کنیم:
|
1 |
pinMode(12,INPUT_PULLUP); |
در این صورت پایه به طور عادی مثبت، ١ یا High است و با محض وصل شدن کلید، صفر یا Low میشود. بعنوان یک نکته دیگر فراموش نکنید که تمام پایههای میکرو به صورت پیشفرض ورودی و با پول آپ غیرفعال هستند.
تا اینجا کار تعریف ورودی و خروجی پایههای دیجیتال به پایان رسید، قدم بعدی نحوه نوشتن یا خواندن از پایههاست. برای نوشتن در یک پایه از تابع digitalWrite استفاده میشود. این تابع دو آرگومان میگیرد که آرگومان اول شماره پایه و آرگومان دوم وضعیت پایه میباشد. به طور مثال با دستور زیر میتوان LED های چشم و دهان ربات را روشن کرد:
|
1 |
digitalWrite(2,HIGH); |
و با دستور زیر LED ها خاموش میشوند:
|
1 |
digitalWrite(2,LOW); |
برای خواندن از یک پایه که بعنوان ورودی تعریف شده باید از تابع digitalRead استفاده کنیم. این تابع تنها یک آرگومان میگیرد و آن شماره پایه مورد نظر است و خروجی تابع نیز وضعیت پایه را نشان میدهد.
به طور مثال در رشته دستورات زیر ابتدا یک متغیر به نام key از نوع عدد صحیح تعریف شده و سپس وضعیت کلید خوانده شده و داخل متغیر قرار گرفته است. در قسمت بعد نیز با یک دستور شرطی if وضعیت کلید بررسی میشود.
|
1 2 3 4 5 6 7 8 9 |
int key; key = digitalRead(12); if(key == LOW){ }else{ } |
در متن برنامه و سناریوی اصلی جلسه اول بیشتر با دستورات خواندن و نوشتن آشنا میشویم. اما قسمت بعدی ماجرا پورت آنالوگ Arduino میباشد. این پایهها که با A0 الی A7 نامگذاری شدهاند بسته به نوع میکرو و نوع تنظیم ولتاژ مرجع قادر به تشخیص ولتاژ ورودی صفر تا پنج ولت بوده و برای تشخیص قطعاتی که در خروجی ولتاژ متغیر میدهند استفاده می شود.
قطعاتی مثل فتوسل (مقاومت متغیر با نور)، NTC یا مقاومت با ضریب حرارتی منفی (مقاومتی که با افزایش دما مقدار آن کم میشود)، ولوم یا پتانسیومتر (مقاومت متغیر)، سنسور دمای LM35، سنسور وزن، سنسور دود و گاز، ولتاژ (برای ساخت ولتمتر) سنسور جریان و هزاران هزار قطعه و ماژول دیگر براحتی از طریق این پایهها قابل خواندن و اتصال به برد آردوینو خواهند بود.
برای خواندن مقدار ولتاژ فتوسل یا مقدار نور محیط از تابع analogRead استفاده میشود، این تابع یک آرگومان بعنوان ورودی گرفته که شماره پایه آنالوگ مدنظر می باشد و در خروجی مقدار ولتاژ را که بسته به نوع میکرو و تنظیمات ولتاژ مرجع می تواند بین صفر تا پنج ولت باشد بصورت عددی و بین عدد صفر تا ١٠٢٣ نمایش میدهد.
در رشته دستورات زیر ابتدا دو متغیر به نام temp و light تعریف شده و سپس مقدار دما و نور محیط از پایه های مربوطه خوانده شده و در متغیرها ذخیره میشود. توجه داشته باشید که برای محاسبه دقیق نور و دما باید بصورت تجربی محاسبات ریاضی بر روی اعداد بدست آمده صورت پذیرد.
|
1 2 3 4 5 |
int temp,light; temp = analogRead(A0); light = analogRead(A1); |
٤- کدنویسی در محیط آردوینو:
برای جلسه اول آموزش آردوینو تصمیم داریم برنامهای ساده بنویسیم که به محض اجرا LED های چشم و دهان ربات NK-100 را چند بار روشن کرده و خاموش کرده و در صورت تکان خوردن سر روبات و وصل شدن کلید جیوهای، LED چشم و دهان روبات یک لحظه روشن شده و مقدار ولتاژ فتوسل و سنسور دما به پورت سریال کامپیوتر ارسال شود.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 |
const int LED = 2; const int key = 12; const int NTC = A0; const int Photocell = A1; void setup() { // put your setup code here, to run once: pinMode(LED,OUTPUT); pinMode(key,INPUT_PULLUP); Serial.begin(9600); for(int i = 0; i<3; i++){ digitalWrite(LED,HIGH); delay(1000); digitalWrite(LED,LOW); delay(1000); } } void loop() { // put your main code here, to run repeatedly: if( digitalRead(key)==LOW ){ digitalWrite(LED,HIGH); delay(500); digitalWrite(LED,LOW); delay(500); Serial.print("Temp:"); Serial.println(analogRead(temp)); Serial.print("Light:"); Serial.println(analogRead(light)); } } |
برنامه یک آردوینو از دو تابع setup و loop تشکیل شده است. تابع setup تنها یک بار در ابتدای برنامه اجرا میشود و معمولا برای پیکرهبندی پورتهای ورودی و خروجی، تنظیمات و کدهایی که فقط یکبار در ابتدای برنامه باید اجرا شوند استفاده میشود.
تابع loop یک حلقه تکرار بوده و کدهای درون آن دائما تکرار میشود و برای نوشتن کدهای اصلی برنامه که نیاز به تکرار همیشگی دارند استفاده میشود. در بالای برنامه و قبل از setup و loop می توان متغیرها، ثابتها، توابع کتابخانهای و سایر توابع را تعریف کرد.
ما در این برنامه برای خوانایی بیشتر برای هر پایه یک ثابت با نام دلخواه تعریف کردهایم. مثلا بهجای پایه شماره 2 از عبارت LED استفاده کردهایم تا موقع کدنویسی و بررسی کدها براحتی بتوانیم منظور برنامه را متوجه شویم و درواقع برنامه را مستندسازی کردهایم.
در قسمت تابع setup ابتدا با دستور pinMode(LED,OUTPUT) پایه متصل به LED را خروجی تعریف کرده و با دستور pinMode(key,INPUT_PULLU) پایه متصل به کلید جیوه ای را ورودی و مقاومت پولآپ داخلی آن را فعال کردهایم.
دستور بعدی یعنی Serial.begin(9600) باعث فعالسازی و پیکرهبندی پورت سریال میکرو با سرعت ٩٦٠٠ بیت برثانیه میشود. پورت سریال میکرو که از طریق مبدل USB به سریال به کامپیوتر متصل شده هم برای پروگرم کردن میکرو کاربرد دارد و هم در حالت اجرای برنامه میتوان برای ارسال و دریافت رشتهها و اعداد به محیط ترمینال آردوینو از آن استفاده کرد. با استفاده از این قابلیت براحتی میتوانیم با برد آردوینو تعامل داشته باشیم و محتوای متغیرها را مشاهده کنیم یا توسط کامپیوتر به برد آردوینو فرمان دهیم.
در انتهای تابع setup به کمک یک حلقه for دستورات داخل حلقه را سه مرتبه تکرار کردهایم. دستورات داخل حلقه شامل digitalWrite(LED,HIGH) برای روشن کردن LED متصل به چشمها و دهان روبات، digitalWrite(LED,LOW) برای خاموش کردن LED و دستور تاخیر یا delay(1000) برای ایجاد یک مکث زمانی ١٠٠٠ میلیثانیهای یا یک ثانیهای برای مشاهده روشن و خاموش شدن LEDها است. با کمک این رشته دستورات چشمها و دهان ربات در ابتدای برنامه سهبار چشمک میزند.
تابع بعدی تابع loop است. در این تابع کد اصلی برنامه نوشته شده که به طور دائم تکرار میشود. در این حلقه با دستور شرطی if خروجی تابع digitalRead(key)==LOW بررسی شده تا اگر برابر با LOW بود یعنی کلید متصل شده و دستورات درون بدنه if اجرا شود.
در داخل بدنه دستور if در ابتدا با دستور digitalWrite(LED,HIGH) چشمها و دهان روبات NK-100 نوینکیت روشن شده و بعد از تاخیر نیم ثانیهای که به کمک دستور delay(500) ایجاد شده، با دستور digitalWrite(LED,LOW) چشمها و دهان روبات خاموش میشود. این علامت نشانه متصل شدن کلید در اثر ضربه است. سپس با کمک دستور Serial.print(“Temp:”) عبارت Temp به سمت پورت سریال برد ارسال می شود که بر روی ترمینال Arduino قابل مشاهده خواهد بود. بلافاصله دستور Serial.println(analogRead(NTC)) اجرا می شود که مقدار آنالوگ پایه متصل به مقاومت حرارتی یا همان سنسور دما را خوانده و به پورت سریال ارسال میکند.
توجه داشته باشید که دستور Serial.print عبارت را در همان خط جاری ارسال میکند و در همانجا باقی میماند ولی دستور Serial.println پس از چاپ عبارت به خط بعدی میرود. به همین ترتیب با دستور Serial.print(“Light: “) عبارت Light بر روی سریال مانیتور آردوینو چاپ شده و سپس با دستور Serial.println(analogRead(photocell)) مقدار ولتاژ فتوسل یا همان شدت نور بر روی خروجی ارسال میشود.
همانطوریکه متوجه شدهاید همیشه نیاز به تعریف متغیر و قرار دادن مقدار دیجیتال یا آنالوگ پورت ورودی در متغیر نیست و میتوان بدون تعریف متغیر به طور مستقیم تابع خواندن پورت را بعنوان آرگومان در دستور یا تابع دیگری مثل if یا print قرار داد.
پس از باز کردن آردوینو و تنظیم نوع برد و شماره پورت طبق آموزش ابتدای این مقاله، کدهای این جلسه را در محیط کامپایلر وارد کرده و کلید فلش گرد را در گوشه بالا و سمت چپ برنامه فشار دهید تا برنامه کامپایل شده و داخل برد آپلود شود. همچنین می توانید از منوی Sketch روی Upload کلیک نمایید.
بعد از آپلود برنامه روی برد، روی کلید ذرهبین در گوشه بالا و سمت راست کامپایلر کلیک کنید تا ترمینال باز شود. در پایین سمت راست ترمینال Baud را روی ٩٦٠٠ قرار دهید. بعد از روشن شدن برد سه مرتبه LED چشمها و دهان ربات NK-100 چشمک می زند سپس منتظر وصل شدن کلید جیوه ای میماند. پس از ضربه زدن به سر ربات کلید جیوه ای وصل شده و LED چشمها و دهان ربات نیم ثانیه روشن شده و بلافاصله مقادیر آنالوگ مقاومت حرارتی و مقاومت نوری (فتوسل) بر روی ترمینال ارسال میشود.

فیلم خروجی جلسه اول آموزش آردوینو روی روبات NK-100 را در این ویدیو مشاهده کنید:
در این جلسه با برد آردوینو و نحوه دانلود و نصب کامپایلر رایگان Arduino آشنا شدیم و ضمن نحوه معرفی پورتهای ورودی و خروجی یک برنامه ساده با آردوینو نوشتیم. در جلسه بعد به امید خدا ماژول DF Player را به پورت سریال نرم افزاری آردوینو متصل کرده و یک روبات سخنگو میسازیم تا بجای چاپ پیامها در ترمینال، با کاربر صحبت کند.
دانلود سورس آردوینو و PDF این مقاله
بازدیدها: 8